In questo articolo si andranno a introdurre concetti base per la progettazione di filtri digitali di tipo FIR.
Nei precedenti articoli abbiamo trattato i filtri digitali IIR (Infinite Impulse Response) con alcuni approcci teorici e progettuali. Si andrà ora a descrivere invece la tipologia FIR (Finite Impulse Response).
In genere, si utilizzano filtri IIR se è richiesta una certa risposta in ampiezza, piuttosto che in fase. Se le specifiche di progetto richiedono invece una determinata risposta in frequenza e/o una certa linearità in fase, si utilizzano filtri FIR.
Si suppone di voler realizzare un filtro passa-basso. La risposta impulsiva e in frequenza sarà:
ovvero un filtro IIR, non causale e quindi non realizzabile.
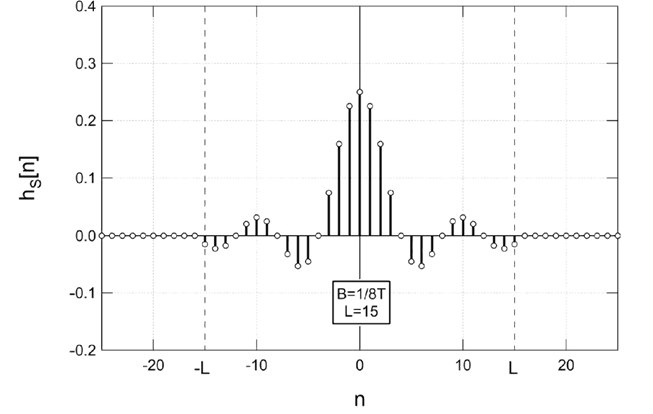
È possibile ottenere una approssimazione del filtro ideale trascurando (considerandoli nulli) i valori di hID[n] per |n|>L con L arbitrario, ottenendo hS[n]. In tal modo, si ottiene un filtro FIR non causale, con risposta impulsiva simmetrica ottenuta da hID[n] per troncamento.
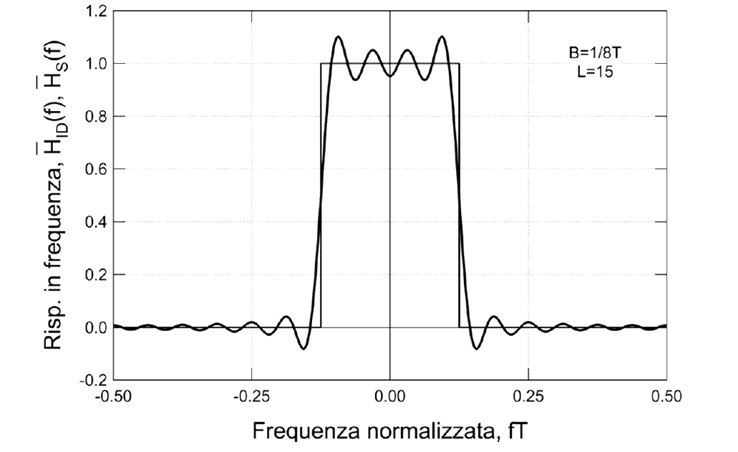
Ciò comporta una differente risposta in frequenza.
Per rendere h[n] ottenuto anche causale, si effettua una traslazione (shift) verso destra di L campioni.
Fonti:
- [Luise, M., & Vitetta, G. M. (2009). Teoria dei segnali (3ª ed.). McGraw-Hill Companies.]
⇐ Tecniche di progettazione IIR: Trasformazione bilineare
Per questo articolo è tutto.
Per dubbi, errori o semplicemente ringraziamenti, puoi contattarci attraverso i nostri contatti social.
Puoi seguirci sul sito: www.antima.it
su Instagram: https://www.instagram.com/antima.it/
su Facebook: https://www.facebook.com/Antima.it/
E l’ implementazione?
Ciao Francesco, presto tratterò l’implementazione di queste tecniche tramite Matlab. Ci sto lavorando su. Continua a seguirci per rimanere aggiornato!